Hardware
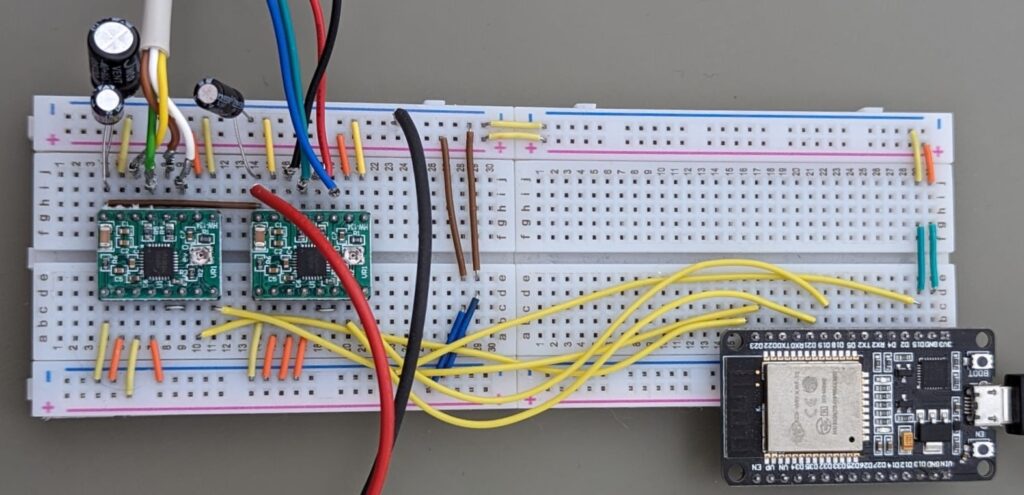
Zur Steuerung unseres Projektes wird ein ESP32 verwendet. Dieser wird nicht nur zur Ansteuerung der Steppertreiber verwendet, sondern auch als WLAN-Hotspot inklusive Hosting der grafischen Benutzeroberfläche (GUI), welches den Startracker steuert.
- WLAN-Konnektivität: Durch die WLAN-Fähigkeiten des ESP32 kann der Startracker drahtlos mit beliebigen PCs verbunden werden. Dies erhöht die Benutzerfreundlichkeit und Flexibilität des Systems erheblich.
- Leistungsfähigkeit: Der ESP32 verfügt über eine Dual-Core-CPU und bietet eine breite Palette von Schnittstellen bei gleichzeitiger sehr niedriger Stromaufnahme. Dies ermöglicht unter anderem die parallele Abarbeitung der Nachführungsoperationen.
Software
Die Implementierung selbst erfolgte in der neuartigen Entwicklungssprache Rust. Diese bietet entscheidende Vorteile für die Programmierung im Startracker-Projekt. Mit einem starken Fokus auf Systemsicherheit minimiert Rust potenzielle Speicherzugriffsfehler und gewährleistet eine zuverlässige Codebasis. Die Sprache bietet zudem eine hohe Leistung, vergleichbar mit C oder C++, was für Embedded-Systeme von Vorteil ist. Die klare Syntax von Rust erleichtert die Entwicklung und langfristige Wartung des Codes.
Der ESP32 erhält über das Webinterface die Azimuth & Altitude Koordinaten zu denen gefahren werden soll und rechnet diese in die zu machenden Schritte der Schrittmotoren um.