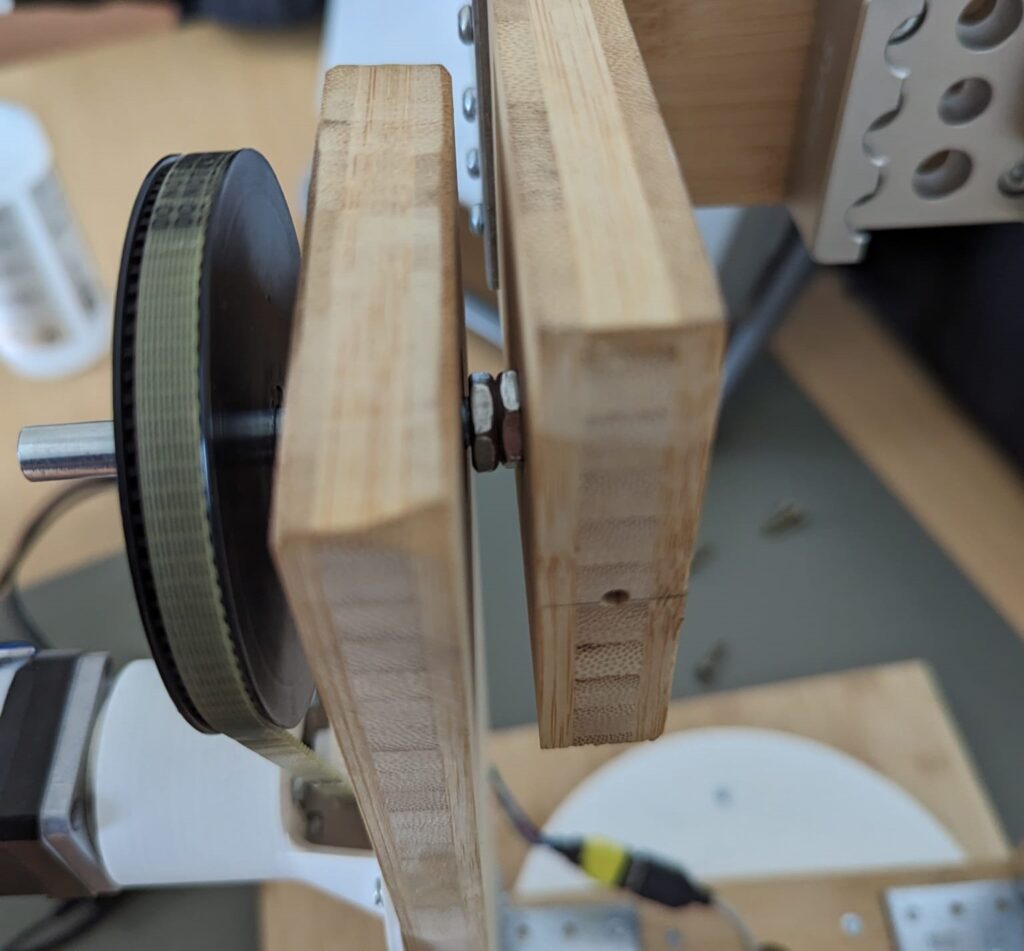
Um die Software und elektronischen Komponenten zusammenzuführen und diesen ihre gewünschte Funktion zu ermöglichen, wurde vom Mechanik-Team ein Gimbal für das Teleskop entworfen und gebaut.
Das Konzept wurde mithilfe eigens konstruierter 3D-Modellen erstellt. Um Witterungsbeständigkeit, Schwingungsarmut, Stabilität aber auch Leichtigkeit zu ermöglichen haben wir Bambusholz für die strukturellen Elemente gewählt.
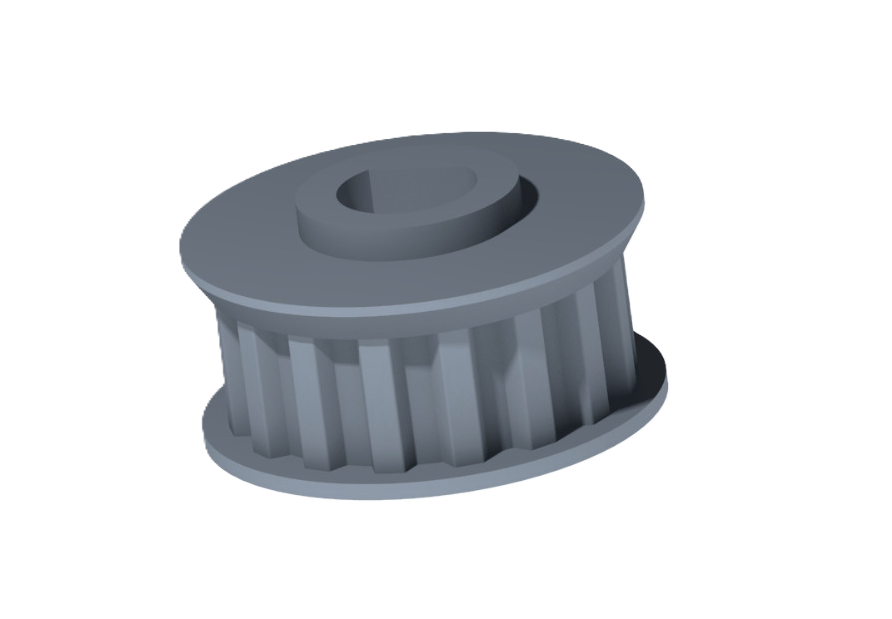
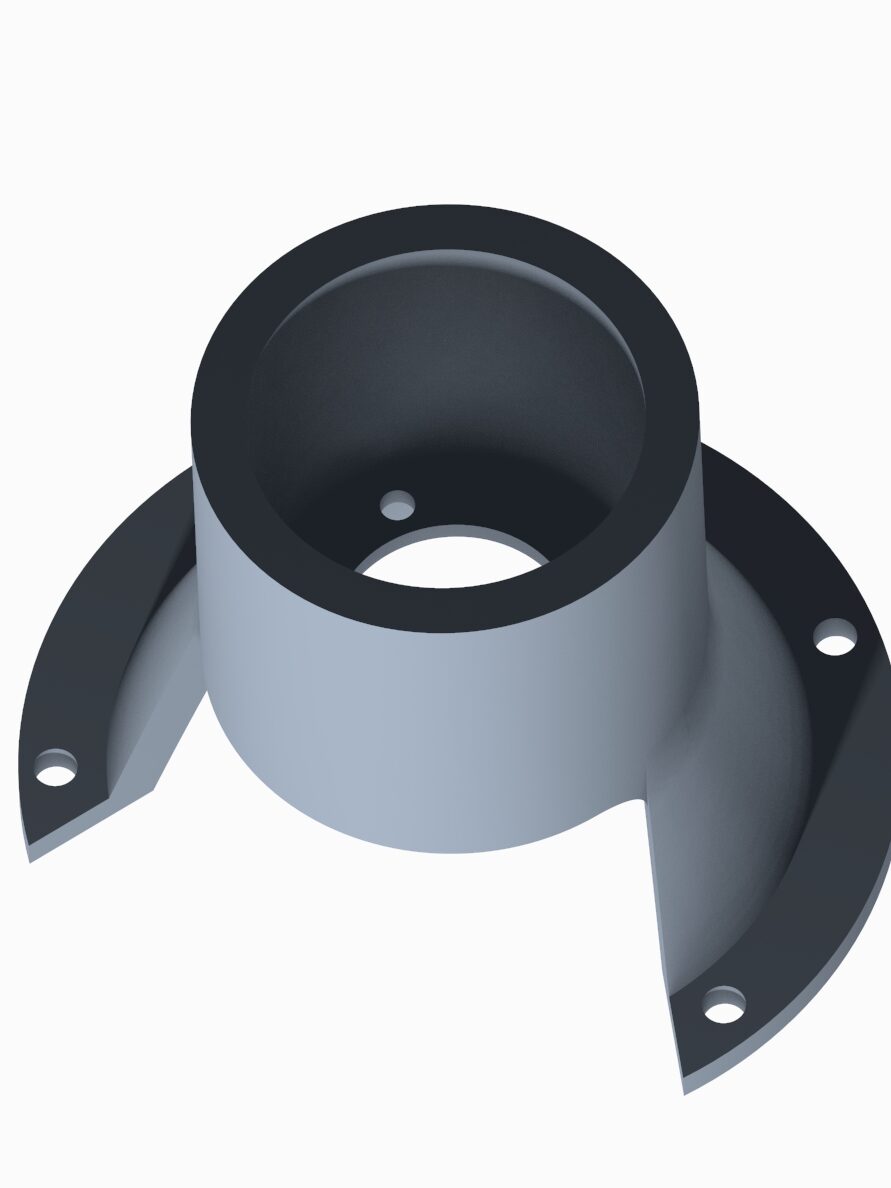
Für die Kraftübertragung zwischen den Drehachsen und den Schrittmotoren wurden Zahnriemen eingesetzt. Da handelsübliche Zahnriemenräder für unseren Anwendungsfall nicht geeignet waren, haben wir alle notwendigen Riemenräder und Motormontagen 3D-modelliert und anschließend 3D-gedruckt. Zur Lagerung der Drehachsen kamen herkömmliche 608-Kugellager sowie ein Drehkranz zum Einsatz.
Hier sind ein einige der 3D-Modelle gerendert dargestellt: